
浪漫的五月里,同学们迎来了第十五届“挑战杯”大赛
热情的六月里,我们相约实验室和大家一起分享“挑战杯”的经验和成果
参赛的同学们向我们展示了他们参加“挑战杯”的作品,并向我们讲述了他们的设计理念,与我们分享了他们这次参加大赛之后的心德和体会。让他们简单的回答了如果你的产品上市了,你要怎么向顾客推销自己的产品。
绿虫仿生机器人是属于一种以太阳光线为动力的昆虫机器人,可以模仿某些昆虫的行为,当这些机器人受到一定的光线照射后,以小型电机做的脚便会移动整个身体,光线越强移动越快,光线越弱移动越慢,甚至停止不动。在这里光线就是它的“食物”,机器人得到食物(光线)便可以行动,而这个动作并不是预先编制的,而是受外界光线千变万化的影响。如果你把这个做好的机器人丢在野外环境中,只要有光线和不被破坏得粉碎,它就会一直顽强地“爬行”下去,这就是绿虫仿生机器人的乐趣所在。有趣的地方还有就是加入了触须反馈控制,在机器人移动的时候不断检测前方障碍物来进行躲避。
绿虫仿生机器人有四部分构成:
(1)钢丝和开光组成触角部分
(2)光敏二极管和发光二极管组成虫眼部分
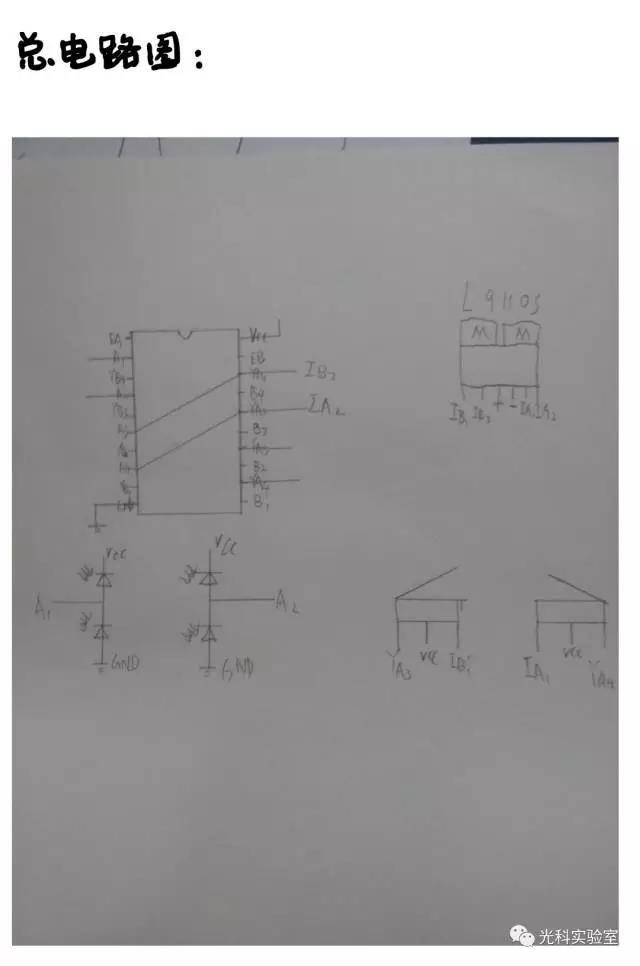
(3)由74hc240集成芯片和l9110s电机驱动模块组成虫脑部分
(4)由两个电机和用报废卡片组成虫足部分
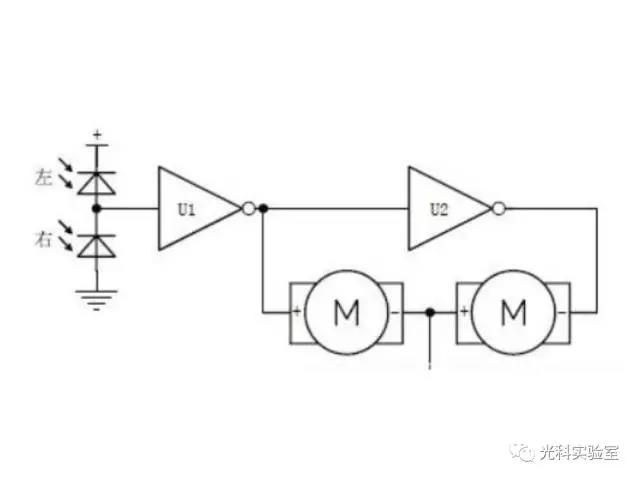
绿虫仿生机器人的寻光系统是利用光敏二极管的工作原理。机器人中利用光敏二极管改变绿虫的电压信号。
绿虫仿生机器人的避障系统是利用触碰式开关接上钢丝作为触角,当触角接触到障碍物时触碰开关就会使芯片产生不同的电压信号从而改变虫身的运动轨迹。

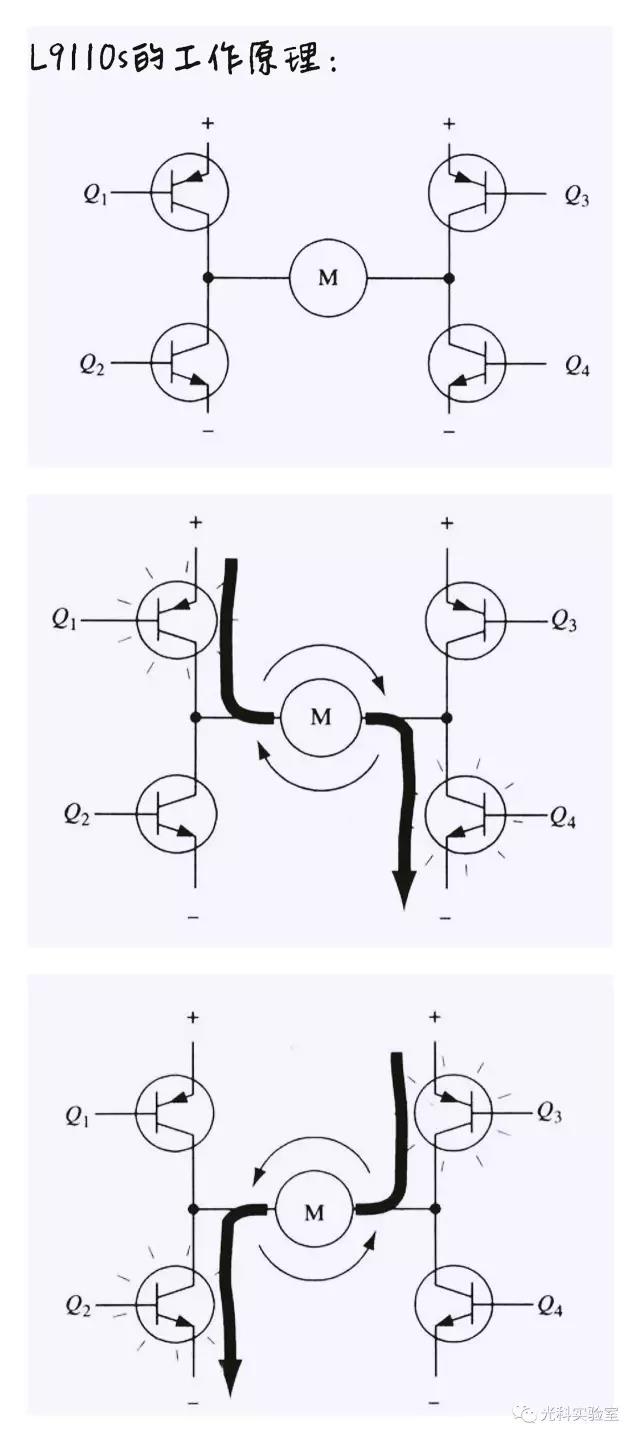
绿虫仿生机器人的动力系统利用的是L9110s的工作原理。
缓存器:(施密特触发器)
施密特触发器的阀值电压决定了系统的给定值,施密特触发器的特性也就决定了这个系统的特性。
缓冲器的作用:
1. 完成速度的匹配。
2. 提供一个暂存的空间。
3. 放大信号,提高驱动能力。减少传输及负载对信号源的影响。
4. 信号隔离的作用,消除负载对信号源的影响。
小知识:
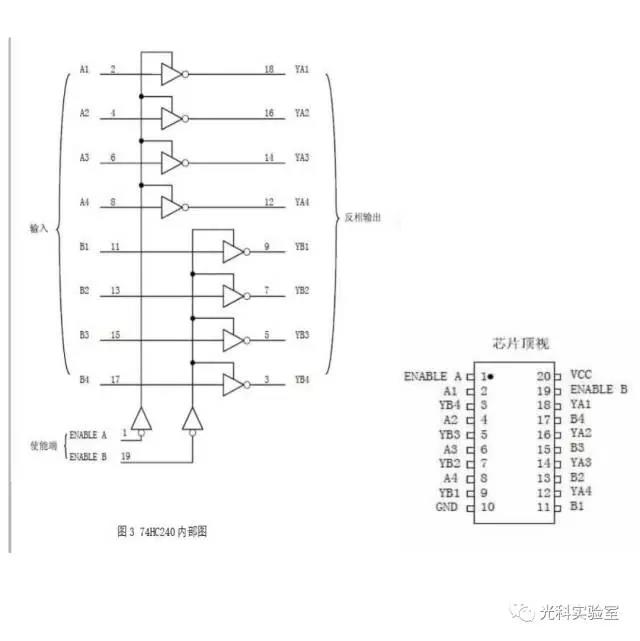
74hc240芯片的介绍:图3是74HC240的框图,可以看到芯片内部由两组带有使能输入端的反向缓冲器组成,输入端和输出端分别为A1, A2, A3,A4, B1, B2, B3, B4(对应管脚2, 4, 6, 8, 11, 13, 15, 17);YA1,YA2, YA3, YA4, YB1, YB2, YB3, YB4(对应管脚 18, 16, 14, 12, 9, 7,5, 3)。使能输入端为Enable A, Enable B (对应管脚1, 19),电源正(对应管脚20),电源地(对应管脚10)。